Фигурная и контурная резка пенопласта (пенополистирола) лазером и горячей струной по низким ценам в Москве на современных ЧПУ станках!
С помощью резки и склеивания из пенополистирола можно изготовить любой объект: буквы, фигуры, статуи, вывески. Компания «Русский Пенопласт» выполняет высокоточную резку пенопласта горячей струной на станках СРП-3222 «Супер Макси».
Пенопласт (пенополистирол) стал одним из самых востребованных материалов для производства легких трехмерных изделий различного предназначения. Поэтому фигурная и контурная 2Dи 3D резка пенопласта в Москве требуется при оформлении большинства вывесок, витрин, монтаже объемных рекламных конструкций, а также реставрации фасадов исторических зданий.
Компания «Русский Пенопласт» предлагает вам самые выгодные условия при заказе фигурной (художественной) и контурной резки пенополистирола. Работа выполняется в минимальные сроки по низкой стоимости. При обнаружении более выгодного предложения на услуги по резке пенопласта вы получаете право на соответствующую скидку от компании «Русский Пенопласт».
При наличии примеров или набросков будущего изделия, загрузите изображения в форму онлайн-заказа. Это значительно ускорит расчет цены 2д и 3д резки пенопласта и поможет нашим специалистам изготовить продукцию, соответствующую всем вашим пожеланиям.
Методики резки пенополистирола
Среди существующих способов обработки пенопласта наиболее точными и актуальными для использования в промышленных масштабах являются только два. Это лазерная 3d резка пенопласта и фигурная, а также контурная резка пенополистирола горячей струной. Они позволяют достаточно быстро и точно воспроизводить разработанные дизайнерами трехмерные модели будущего пенопластового изделия.
Контурная и фигурная резка пенопласта лазером
Обработка пенопласта с помощью лазерного луча делает возможным изготовление двумерных и трехмерных изделий из пенопласта любой сложности при минимальном термическом воздействии на этот материал.
Процедура вырезания фигур на современных станках автоматизирована, поэтому человеческие ошибки при резке пенопласта полностью исключены.
Художественная резка пенопласта струной
Специалисты компании «Русский Пенопласт» при изготовлении нужных заказчикам пенопластовых изделий используют именно эту технологию. Производственные площади оснащены 3-мя станками СРП-3222 «Супер Макси», которые отличаются высокой производительностью. Цена фигурной и контурной ЧПУ резки пенопласта струной значительно меньше, чем лазером. При этом качество детализации сложных изделий из пенопласта не снижается.
Достоинства пенопласта в качестве материала для декора и рекламы
Можно определить несколько основных преимуществ пенополистирола, по сравнению с другими материалами, которые используются для производства аналогичных изделий.
- Низкая цена. ЧПУ резка пенопласта с последующей обработкой дает возможность создать качественные и прочные изделия по невысокой стоимости.
- Легкость. Эта особенность значительно облегчает транспортировку и позволяет сократить затраты на монтаж пенопластовых конструкций.
- Отсутствие ограничений по размеру и форме. Пенопласт дает возможность воплотить любую задумку в нужном размере с необходимой детализацией.
- Возможность ремонта. Несмотря на достаточно высокую прочность, изделия из пенополистирола с покрытием могут повреждаться из-за погодных условий или действий людей. При этом на замену или ремонт пострадавшего элемента потребуется минимум времени. При необходимости специалисты «Русский Пенопласт» проведут срочный ремонт на протяжении суток.
Что вы можете заказать в «Русский Пенопласт»
Связавшись с представителем нашей компании, можно заказать изготовление любого изделия из нашего ассортимента. В том числе:
В том числе:
- Фигуры и фигурки различных людей, животных и фантастичных существ;
- Муляжи существующих и придуманных объектов всех размеров;
- Объемные буквы для рекламных вывесок, витрин, торжеств и фотосессий;
- Слова и надписи всеми существующими шрифтами;
- Буквы и знаки с контурной и фасадной подсветкой;
- Вывески и таблички;
- Оригинальные стенды для выставок и промо-акций;
- Садово-парковые скульптуры;
- Различные декоративные элементы для оформления фасадов зданий;
- Колонны и полуколонны разнообразного вида;
- Праздничные тематические украшения;
- Шары, конусы и другие геометрические фигуры различного предназначения;
- Театральные декорации любого размера и сложности;
Кроме того, возможна фигурная 2d и 3d резка индивидуальных конструкций из пенопласта. Если у вас нет модели будущего изделия, наш дизайнер разработает ее отдельно.
Чтобы заказать фигурную и контурную резку пенопласта в Москве по минимальной цене, свяжитесь с менеджером компании «Русский Пенопласт». Для вашего удобства на сайте представлены номера телефонов и адрес электронной почты, а также есть возможность заказа обратного звонка.
Фигурная и лазерная резка пенопласта струной
Оставить заявку на расчёт стоимости
Нажимая кнопку Отправить Вы соглашаетесь с Политикой конфиденциальности и Обработкой персональных данных
Фигурная и контурная резка – это прекрасная возможность получить, красивые объемные фигуры, буквы и вывески 3D, выполненные с точностью до миллиметра.
Заказать качественную художественную и контурную резку по доступным ценам в Москве, выполненную на новом оборудовании, Вы сможете в компании «ТОП-Пенопласт».
Просто воспользуйтесь формой «ЗАКАЗАТЬ РАСЧЕТ», указав размеры и дополнительные параметры, или и наш менеджер свяжется с Вами в течение нескольких минут для уточнения всех необходимых деталей.
ОСОБЕННОСТИ
Компания «ТОП-Пенопласт» предлагает всем желающим воспользоваться услугами фигурной или контурной резки пенополистирола в городе Москва. Наши специалисты выполнят для Вас художественную 3Д резку пенопласта по низким ценам и в короткие сроки.
Есть несколько причин заказать именно у нас:
- высококачественное оборудование. Обязательным условием производства качественной продукции связанной с фигурной резкой пенополистирола является использование современного оборудования с числовым программным управлением (ЧПУ). Для выполнения контурной и фигурной резки пенопласта в виде шара, треугольника, куба и других фигур в нашей компании используется именно такое оборудование, позволяющее практически полностью автоматизировать данный процесс, свести к минимуму воздействие человеческого фактора и, как следствие, исключить производство некачественной продукции.
- современные методы 3D-моделирования.
 Мы понимаем, что обязательным условием создания уникальной рекламной продукции и декора из пенопласта, является тщательная разработка дизайна с помощью 3D-моделирования и последующей 3Д резки. Точность выполнения проектов в «ТОП-Пенопласт» гарантируется использованием современного программного обеспечения, осуществляющего контроль над всеми этапами производства продукции. Специальные программы помогают нам создавать модели из пенопласта любой сложности, после чего их графические изображения передаются на станок, где обеспечивается точное соблюдение заданных параметров фигурной резки пенополистирола.
Мы понимаем, что обязательным условием создания уникальной рекламной продукции и декора из пенопласта, является тщательная разработка дизайна с помощью 3D-моделирования и последующей 3Д резки. Точность выполнения проектов в «ТОП-Пенопласт» гарантируется использованием современного программного обеспечения, осуществляющего контроль над всеми этапами производства продукции. Специальные программы помогают нам создавать модели из пенопласта любой сложности, после чего их графические изображения передаются на станок, где обеспечивается точное соблюдение заданных параметров фигурной резки пенополистирола. - квалифицированный персонал. В нашей компании при разработке проектов готовых изделий принимают участие опытные дизайнеры и мастера по контурной и фигурной резке. А это значит, что не только красота, но и качество созданных нами изделий будет на высоте.
 Мы понимаем, что обязательным условием создания уникальной рекламной продукции и декора из пенопласта, является тщательная разработка дизайна с помощью 3D-моделирования и последующей 3Д резки. Точность выполнения проектов в «ТОП-Пенопласт» гарантируется использованием современного программного обеспечения, осуществляющего контроль над всеми этапами производства продукции. Специальные программы помогают нам создавать модели из пенопласта любой сложности, после чего их графические изображения передаются на станок, где обеспечивается точное соблюдение заданных параметров фигурной резки пенополистирола.
Мы понимаем, что обязательным условием создания уникальной рекламной продукции и декора из пенопласта, является тщательная разработка дизайна с помощью 3D-моделирования и последующей 3Д резки. Точность выполнения проектов в «ТОП-Пенопласт» гарантируется использованием современного программного обеспечения, осуществляющего контроль над всеми этапами производства продукции. Специальные программы помогают нам создавать модели из пенопласта любой сложности, после чего их графические изображения передаются на станок, где обеспечивается точное соблюдение заданных параметров фигурной резки пенополистирола.Мы готовы осуществить фигурную и контурную резку пенопласта по Вашему собственному эскизу, либо по макету, разработанному нашими специалистами, с учетом Ваших требований и пожеланий, быстро, качественно и по умеренным ценам! Обращайтесь! Более подробно ознакомиться с полным перечнем продукции и услуг нашей компании Вы можете в разделе «Каталог продукции».
ШИРОКИЕ ВОЗМОЖНОСТИ 3Д-РЕЗКИ
В современном мире пенопласт представляет собой материал, широко применяемый в промышленности, строительстве, производстве и других сферах жизни. В последнее время он активно используется для изготовления ярких и запоминающихся вывесок, рекламных стендов, декорирования фасадов и внутренних интерьеров помещения, создания муляжей и букв, различной упаковки, позволяющей предотвратить повреждение при транспортировке продукции, а также в качестве теплоизоляционного материала при строительстве домов.
Компания «ТОП-Пенопласт» на протяжении нескольких лет занимается изготовлением подобного рода продукции. Добиться высочайшего качества готовых изделий нам удается с помощью современных методов обработки материала, главным из которых является контурная резка нагретой струной на специальном станке, позволяющая создавать пенопластовые изделия любой сложности, в том числе объемные фигуры в формате 3D с большим количеством мелких деталей.
[ВИДЕО] Как резать пенопласт: Slice по сравнению с традиционными лезвиями
В этом видео показано, как легко резать пенопласт с помощью ручного промышленного ножа Slice ® . Slice также производит промышленный нож с автоматическим выдвижением. Оба инструмента оснащены запатентованным безопасным лезвием Slice, которое служит в 11 раз дольше, чем сталь. Лезвие выдвигается до 3 дюймов (76 миллиметров) и позволяет резать толстый пенопласт.
Разобраться, как резать пенопласт, несложно, но возникает вопрос: безопасно ли вы режете пенопласт с помощью подходящего ножа для пенопласта или ножа для пенопласта?
Прежде чем мы рассмотрим, как безопасно резать пенопласт, давайте поближе познакомимся с материалом.
Многоликая пена
Пена бывает разных форм, и разные типы пены обладают разными свойствами. Есть пена с эффектом памяти, которая медленно приходит в норму после сжатия; пена антистатическая для электрооборудования; и пенопласт для яичных ящиков, который хорошо поглощает звук.
Некоторая пена мягкая, некоторая плотная и умеренно твердая, а некоторая совершенно жесткая, как пена, используемая для блоков для йоги, пенопластовых роликов в спортзалах и внутри велосипедных шлемов. Жесткий пенопласт принимает окончательную форму. Более мягкая пена поставляется в виде листов различной толщины. Как конечные пользователи, так и производители режут пену в соответствии со своими целями.
Использование мягкой гибкой пены
Мягкая пена выполняет две основные функции: амортизацию и защиту. В качестве амортизирующего материала пенопласт используется для:
- наматрасников
- подушки
- коврики для кемпинга
- лежанки для животных
- гимнастические или акробатические краш-питы
В качестве защитного материала пена идеально подходит для облицовки жестких кейсов, таких как те, которые производит компания Pelican. Он также используется для упаковки деликатных или хрупких материалов или ценных предметов, таких как стекло, произведения искусства, керамика и фотоаппараты.
Как эффективно резать пенопласт
Учитывая множество применений пенопласта, он популярен в промышленных и производственных условиях, а также в быту.
Если вы хотите узнать, как разрезать листы пенопласта, как разрезать пенопласт для амортизации чехла пеликана или как разрезать пенопластовые подушки, вам понадобится нож для пенопласта или нож для пенопласта с лезвием в хорошем состоянии. Лезвие резака для пенопласта должно резать аккуратно. Мягкая пена легко рвется, поэтому слишком тупое лезвие порвет вашу пену.
Обычные инструменты для резки пенопласта: они опасны
Многие люди используют традиционные канцелярские ножи, традиционные канцелярские ножи и универсальные ножи с более длинными лезвиями для резки пенопласта. Некоторые люди могут использовать кухонный нож с керамическим лезвием в качестве ножа для резки пены, потому что лезвие длинное, а край даже острее, чем у новых металлических лезвий.![]() Мы не выдумываем это; мы знаем, что работники складов и розничной торговли используют мясные ножи в качестве универсальных режущих инструментов на работе — мясные ножи!
Мы не выдумываем это; мы знаем, что работники складов и розничной торговли используют мясные ножи в качестве универсальных режущих инструментов на работе — мясные ножи!
Все эти варианты опасны, потому что эти сверхострые лезвия порежут вашу кожу так же легко, как и пену. Керамический нож — это кухонный инструмент, поэтому держите его на кухне. Никогда не используйте инструмент не по прямому назначению.
Стальные лезвия очень острые, потому что быстро тупятся; сталь — относительно мягкий материал. Поскольку вам нужно лезвие, которое будет резать чисто и не рвет пенопласт, некоторые предлагают использовать новое лезвие каждый раз, когда вы режете этот эластичный материал. Но когда вы держите лезвие в руках, вы подвергаетесь высокому риску порезов. Чем меньше раз вам придется менять лезвие, тем лучше.
Металлические лезвия также гнутся. Чем длиннее лезвие, тем сильнее оно изгибается. При достаточном давлении эти лезвия могут сломаться и разлететься в непредсказуемых направлениях. Это чрезвычайно опасно, особенно если вы не используете надлежащую защиту для глаз.
Это чрезвычайно опасно, особенно если вы не используете надлежащую защиту для глаз.
Пена для резки: для более безопасных и точных инструментов выберите Slice
Целью Slice является создание более безопасных инструментов. Мы делаем это с помощью нашего запатентованного безопасного шлифования — наши лезвия с удобными для пальцев® безопасными на ощупь — и эргономичными ручками.
Лезвия для срезов изготовлены из 100-процентного оксида циркония, современной керамики. Наша запатентованная конструкция лезвия, помимо обеспечения более безопасного лезвия, использует преимущества твердости этого материала: лезвия Slice, как было протестировано, служат в 11 раз дольше, чем стальные лезвия. Это означает меньшее количество замен лезвий, что снижает вероятность травм.
Другими словами, лезвия Slice отличаются от всех остальных лезвий, и не все керамические лезвия одинаковы.
Рукоятки инструментов для нарезки изготовлены из высококачественного нейлона со стекловолокном. Этот материал прочный, легкий и прочный.
Этот материал прочный, легкий и прочный.
Инструмент для резки пенопласта
Ручной промышленный нож и автоматически выдвигающийся промышленный нож — два превосходных инструмента для резки пенопласта. Оба инструмента имеют кнопку ползунка, которую пользователь задействует, чтобы открыть лезвие. Чтобы лезвие оставалось открытым на модели с автоматическим выдвижением, пользователь должен удерживать ползунок на месте. Если пользователь отпускает ползунок, лезвие автоматически втягивается в рукоятку.
Ползунок на модели с ручным управлением фиксирует лезвие в нужном положении. Пользователь должен повторно задействовать ползунок, чтобы втянуть лезвие.
Максимальная глубина лезвия для обоих ножей составляет 76 миллиметров или 3 дюйма, а ручной нож обеспечивает три дополнительных фиксированных значения глубины резания: 6 миллиметров, 28 миллиметров и 53 миллиметра. Твердость и конструкция лезвий Slice гарантируют, что они прослужат дольше, чем металлические лезвия, и не будут гнуться.
Прочное лезвие, которое остается жестким, обеспечивает точные разрезы в течение длительного времени. Вы также получите инструмент, который хорошо обрабатывается.
Вы левша и думаете: «Отлично, я бы хотел этот безопасный нож, но бьюсь об заклад, я не смогу им пользоваться?» Наоборот, промышленные ножи Slice симметричны. Если край ориентирован для правшей, снимите лезвие и переверните его. Бинго! Инструмент для левшей. Дополнительный бонус: для снятия или установки лезвия не требуются инструменты.
К промышленным ножам Slice подходят два лезвия: промышленное лезвие с закругленным концом и промышленное лезвие с заостренным концом. Первый обеспечивает дополнительную безопасность и отлично подходит, если вы будете резать с края материала. Если вам нужно разрезать пенопласт посередине — скажем, вы разрезаете пенопласт для хранения хрупких предметов в футляре-пеликане, — лезвие с заостренным концом — лучший выбор. Вам понадобятся точные нестандартные вырезы в пенопласте, чтобы ваш драгоценный груз плотно прилегал.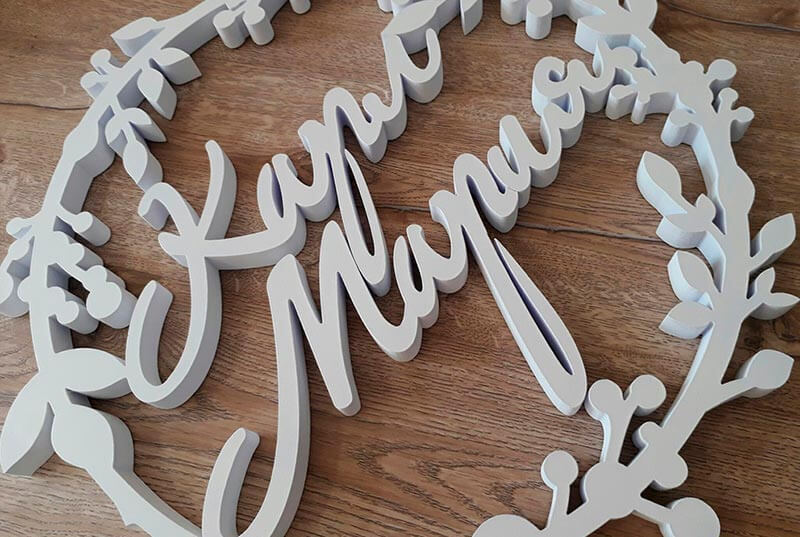
Какой бы промышленный нож Slice вы ни выбрали, вы научитесь безопасно, точно и эффективно резать пенопласт.
Станок для резки пенопласта с ЧПУ Arduino
В этом уроке мы научимся собирать станок для резки пенопласта с ЧПУ на Arduino. Это типичный самодельный станок с ЧПУ, потому что он сделан из простых и дешевых материалов, некоторых напечатанных на 3D-принтере деталей и имеет Arduino в качестве контроллера.
Вы можете посмотреть следующее видео или прочитать письменный учебник ниже.
ОбзорВместо бит или лазеров основным инструментом этой машины является нагревательная проволока или специальный тип резистивной проволоки, которая сильно нагревается, когда через нее проходит ток. Горячая проволока плавит или испаряет пену при прохождении через нее, поэтому мы можем точно и легко получить любую желаемую форму.
Я сказал легко, потому что построить станок с ЧПУ на самом деле не так уж и сложно. Если вы новичок и думаете о создании своего первого станка с ЧПУ своими руками, просто следите за обновлениями, потому что я объясню, как все работает. Я покажу вам весь процесс ее создания, начиная с проектирования машины, подключения электронных компонентов, программирования Arduino, а также объясню, как подготовить ваши формы, создать G-коды и управлять машиной с помощью бесплатных программ с открытым исходным кодом. Итак, давайте углубимся в это.
Я покажу вам весь процесс ее создания, начиная с проектирования машины, подключения электронных компонентов, программирования Arduino, а также объясню, как подготовить ваши формы, создать G-коды и управлять машиной с помощью бесплатных программ с открытым исходным кодом. Итак, давайте углубимся в это.
Станок для резки пенопласта с ЧПУ Arduino 3D-модель
Для начала, вот 3D-модель этого станка. Вы можете скачать и 3D модель ниже.
Вы можете найти и скачать эту 3D-модель, а также изучить ее в своем браузере на Thangs.
Загрузите 3D-модель сборки на Thangs.
Файлы STL для 3D-печати:
Базовая конструкция изготовлена из алюминиевых профилей с Т-образными пазами 20×20 мм. Я выбрал эти профили, потому что они просты в использовании, нам не нужно сверлить какие-либо отверстия или что-то еще при сборке, а также они многоразовые, мы можем легко разобрать и использовать их для других проектов. Движение каждой оси достигается с помощью линейных подшипников, скользящих по 10-миллиметровым гладким стержням. Я использовал два стержня для каждой оси.
Я использовал два стержня для каждой оси.
Выдвижные блоки могут выглядеть немного странно, но они сконструированы таким образом, что их можно легко распечатать на 3D-принтере как единую деталь, выполняющую несколько функций. Так, например, на скользящем блоке X размещены два линейных подшипника, он удерживает стержень оси Y, удерживает шкив для ремня оси Y, а также имеет ручки для крепления ремня оси X.
Для привода скользящих блоков мы используем шаговые двигатели NEMA 17. С помощью муфты вала, простого стержня с резьбой, двух шкивов и двух ремней мы можем одновременно равномерно приводить в движение два скользящих блока на каждом рельсе.
Здесь мы также можем заметить, что у нас есть третий шаговый двигатель, который позволяет машине создавать 2,5D-формы, и мы объясним, как это работает чуть позже в видео.
В целом, с точки зрения конструкции и жесткости конструкция, вероятно, не так уж хороша, но я хотел сделать функциональную машину с минимальным количеством деталей, которая при этом могла бы выполнять свою работу.
Для 3D-печати деталей я использовал свой 3D-принтер Creality CR-10, который является действительно хорошим 3D-принтером по разумной цене.
Обратите внимание, что некоторые детали, напечатанные на 3D-принтере, нуждаются в небольшой постобработке или перед использованием необходимо удалить вспомогательный материал.
В некоторых случаях мне также приходилось использовать рашпиль для удаления лишнего материала, я думаю, из-за плохих настроек поддержки в программе для нарезки.
Сборка ЧПУ
Итак, теперь у меня есть все материалы, и я могу начать сборку станка.
Вот список всех основных компонентов, используемых в этом станке с ЧПУ. Список электронных компонентов можно найти ниже в разделе принципиальных схем статьи.
- 6x 20×20 мм 500 мм алюминиевые профили с Т-образными пазами …. Amazon / Banggood / AliExpress
- 4x 10 мм линейные направляющие стержни ………………….. Amazon / Banggood / AliExpress …. . Amazon / Banggood / AliExpress
- 50 гаек M5 для Т-образных профилей ………………. Amazon / Banggood / AliExpress
- 6x Линейные подшипники 10 мм ……………………… Amazon / Banggood / AliExpress
- GT2 Ремень + зубчатый шкив + натяжной шкив …. Amazon / Banggood / AliExpress + Натяжной ролик
- 2x Подшипник 5x16x5 мм ……………………….. Amazon / Banggood / AliExpress 9 ….. м с использованием подшипника 6 мм, а также резьбового стержня и шкивов GT2. Здесь я предлагаю использовать 5 мм, потому что эти размеры более распространены и их легко найти. Поэтому в загружаемые файлы STL я также включил две версии соединителей валов и монтажных кронштейнов, соответствующих этим размерам. Поэтому обязательно учитывайте это при 3D-печати этих деталей.
- Распорные гайки ………………………………… Amazon / Banggood / AliExpress
- Комплект пружин……………….. Amazon / Banggood 4 / AliExpress
- Горячая проволока ………………………………………. Amazon / AliExpress
- 2 стержня с резьбой по 50 см или любой стержень диаметром 6 или 5 мм в зависимости от внутреннего диаметра шкива
- Болты и гайки из местного хозяйственного магазина: х40, М5х15 х8, М5х25 х4, М5х30 х4
 . Amazon / Banggood / AliExpress
. Amazon / Banggood / AliExpress 
Раскрытие информации: это партнерские ссылки. Как партнер Amazon я зарабатываю на соответствующих покупках.
Алюминиевые профили с Т-образными пазами, которые у меня были, были длиной 60 см, поэтому в соответствии с 3D-моделью я обрезал каждый из них по размеру с помощью ручной пилы по металлу. Затем, используя угловые кронштейны, я собрал базовую раму. Далее я устанавливаю защелки вала для оси X. Видите ли, работать с профилями с Т-образными пазами так просто, нам просто нужны болты М5 и гайки с Т-образными пазами для крепления к ним всевозможных вещей.
Видите ли, работать с профилями с Т-образными пазами так просто, нам просто нужны болты М5 и гайки с Т-образными пазами для крепления к ним всевозможных вещей.
Затем я вставляю стержень вала через зажимы. Пока вставлена половина, нам также нужно добавить скользящий блок оси X. Мы просто помещаем в него два подшипника, а затем вставляем их на вал. Теперь мы можем вставить вал на другую сторону и с помощью болта M4 и гайки закрепить вал на месте. Я повторил этот процесс и для другой стороны.
Далее нам нужно установить оси Y. Для этого сначала нам нужно вставить стержни в скользящие блоки оси X, расположить их заподлицо с нижней частью детали и закрепить с помощью гаек и болтов M4. Затем мы можем вставить скользящие блоки оси Y. В этих скользящих блоках используется только один линейный подшипник.
Поверх стержней оси Y нам нужно прикрепить монтажные скобы, которые будут соединять два стержня оси Y с Т-образным профилем наверху. Опять же, мы используем тот же метод для крепления их к стержням. Для крепления профиля с Т-образным пазом к монтажным кронштейнам я сначала добавил на них 3 болта М5 и гайки с Т-образным пазом. Затем я просто вставил профиль и закрепил болтами.
Для крепления профиля с Т-образным пазом к монтажным кронштейнам я сначала добавил на них 3 болта М5 и гайки с Т-образным пазом. Затем я просто вставил профиль и закрепил болтами.
Итак, у нас построена основная конструкция, и мы можем свободно перемещаться как по оси X, так и по оси Y.
Далее я прикрепляю ножки к базовой раме. Опять же, это так просто сделать, используя профили с Т-образными пазами. Как только ножки будут закреплены, я собираюсь вставить первый шаговый двигатель для оси X. В этом случае я использую 20-миллиметровые прокладочные гайки, чтобы отдалить вал двигателя, чтобы позже я мог разместить ременный шкив рядом с опорой.
Итак, теперь у меня есть простой стержень с резьбой 6 мм, который будет одновременно приводить в движение два ремня. Поэтому сначала я обрезал его по размеру, поместил подшипник с внутренним диаметром 6 мм на противоположную ногу шагового двигателя и пропустил через него стержень с резьбой. Затем вставил гайку для крепления штока к подшипнику и два зубчатых шкива для ремней.
Для соединения резьбового стержня с шаговыми двигателями я напечатал на 3D-принтере муфту вала с отверстием 5 мм на стороне шагового двигателя и отверстием 6 мм на стороне стержня. Соединитель вала имеет прорези для вставки гаек M3, а затем, используя болты M3 или винты с резьбой, мы можем легко прикрепить его к валу двигателя и резьбовому стержню. Затем нам нужно расположить шкивы на одной линии с ручками раздвижных блоков, а также закрепить их установочными винтами.
На противоположной стороне машины можно вставить два натяжных ролика. Для этой цели я использовал несколько болтов и гаек M5.
Итак, теперь мы готовы установить ремни GT2 для оси X. Сначала я вставил и закрепил ремень на выдвижном блоке с помощью стяжки. Затем я пропустил ремень вокруг зубчатого шкива, с другой стороны вокруг натяжного шкива, обрезал его до нужного размера и снова закрепил с другой стороны скользящего блока с помощью стяжки.
Я повторил этот процесс и для другой стороны. При закреплении другой стороны мы должны убедиться, что два скользящих блока находятся в одном и том же положении по оси X. Для этого мы можем просто переместить их к концу рельсов, чтобы мы могли натянуть ремень и закрепить его стяжкой. При этом механизм скольжения по оси X выполнен.
Для этого мы можем просто переместить их к концу рельсов, чтобы мы могли натянуть ремень и закрепить его стяжкой. При этом механизм скольжения по оси X выполнен.
Связанный: Самодельный перьевой плоттер с автоматической сменой инструмента | Чертежный станок с ЧПУ
Далее таким же методом соберем механизм оси Y. Для крепления ремня к скользящему блоку снова используем стяжки. Здесь выдвижной блок имеет только одну ручку, и чтобы закрепить ремень, я сначала завязал молнию на одном конце ремня, затем натянул ремень, чтобы он был достаточно тугим, и другой стяжкой зацепил оба конца ремня. Теперь я могу просто снять предыдущую стяжку и отрезать лишний пояс. Как упоминалось ранее, при закреплении ремня с другой стороны мы должны убедиться, что два скользящих блока находятся в одном и том же положении по оси Y. С этим механизм оси Y также сделан.
Далее я прикреплю еще один Т-образный профиль по оси X. Этот профиль будет служить для крепления к нему 3-го шагового двигателя, а также для размещения на нем кусочков пенопласта. С помощью 3-го шагового двигателя мы можем создавать на этой машине 2,5-мерные или фактически трехмерные фигуры, например, шахматную фигуру.
С помощью 3-го шагового двигателя мы можем создавать на этой машине 2,5-мерные или фактически трехмерные фигуры, например, шахматную фигуру.
Итак, теперь нам нужно установить провод сопротивления. Этот провод должен выдерживать высокие температуры, сохраняя при этом одинаковую температуру по всей длине. Обычно это нихромовая проволока или рыболовная проволока из нержавеющей стали, которые на самом деле недороги и их легко достать. Для правильной работы проволока должна быть натянута между двумя башнями или скользящими блоками, и вот как я это сделал. Я прикрепил болты M5 к обоим скользящим блокам и добавил к ним небольшие пружины растяжения.
Затем я просто прикрепил проволоку к пружинам. Я натянул проволоку настолько, насколько позволяли пружины. Проволока должна быть натянута вот так с пружинами, потому что, когда она нагреется, она также увеличит свою длину, и пружины смогут это компенсировать.
Итак, теперь мы можем соединить провод сопротивления с электрическими проводами. Мы будем использовать питание постоянного тока, поэтому полярность не имеет значения, важно, чтобы ток протекал по проводу, чтобы нагреться. Здесь убедитесь, что ваш электрический провод имеет достаточную галочку, чтобы поддерживать потребление тока от 3 до 5 ампер. В моем случае я использую провод 22-го калибра, но я бы точно посоветовал 20-й или 18-й калибр.
Мы будем использовать питание постоянного тока, поэтому полярность не имеет значения, важно, чтобы ток протекал по проводу, чтобы нагреться. Здесь убедитесь, что ваш электрический провод имеет достаточную галочку, чтобы поддерживать потребление тока от 3 до 5 ампер. В моем случае я использую провод 22-го калибра, но я бы точно посоветовал 20-й или 18-й калибр.
Сначала я закрепил электрический провод между двумя гайками, чтобы ток проходил через катушку к проводу сопротивления. На самом деле это не сработало, и я покажу вам, почему через минуту. Я провел провод через ручки выдвижного блока, чтобы оставаться аккуратным и подальше от горячего провода.
Далее нам нужно установить концевые упоры или концевые выключатели станка с ЧПУ. Эти микроконцевые выключатели имеют 3 соединения: заземление, нормально разомкнутое и нормально замкнутое соединение. Первоначально я подключил их к нормально открытым соединениям, но после con
некоторые тесты воздуховодов Я переключился на нормально замкнутое соединение, потому что так машина работает более стабильно.
Проблема заключается в электрическом шуме, создаваемом во время работы станка с ЧПУ, который ложно срабатывает при нажатии переключателей и приводит к остановке станка.
Схема устройства для резки пенопласта с ЧПУ Arduino
Далее мы можем подключить кабели шаговых двигателей, а затем посмотреть, как подключить все электронные компоненты. Вот принципиальная схема того, как все должно быть подключено.
Конечно же, мозгом этого станка с ЧПУ является плата Arduino. Наряду с этим нам также понадобится Arduino CNC Shield, три шаговых драйвера A4988 и преобразователь постоянного тока в постоянный для управления температурой горячей проволоки.
Вы можете получить компоненты, необходимые для этого проекта, по ссылкам ниже:
- Шаговый двигатель — NEMA 17………… Amazon / Banggood / AliExpress
- A4988 Драйвер шагового двигателя……………….… Amazon / Banggood / AliExpress
- Arduino CNC Shield ……………………. . Amazon / Banggood / AliExpress
- Arduino Uno……………………………..… Amazon / Banggood / AliExpress
- DC-DC преобразователь ……………………… …… Amazon / Banggood / AliExpress
- Концевой выключатель …………………………………….. Amazon / Banggood / AliExpress
- Блок питания постоянного тока ………………… ………… Amazon / Banggood / AliExpress
Раскрытие информации: это партнерские ссылки. Как партнер Amazon я зарабатываю на соответствующих покупках.
Я напечатал на 3D-принтере подставку для электронных компонентов, которую прикрепил к одной стороне Т-образного профиля. С помощью болтов M3 сначала я прикрепил плату Arduino к подставке, а затем вставил на нее защитный экран Arduino CNC.
Далее нам нужно выбрать разрешение, при котором драйверы шаговых двигателей будут управлять двигателями с помощью некоторых перемычек. В моем случае я выбрал разрешение 16-го шага, добавив три перемычки к каждому драйверу, чтобы степперы двигались более плавно.
При размещении драйверов убедитесь, что их ориентация правильная, маленький потенциометр может быть индикатором того, что должно быть ориентировано на нижнюю сторону экрана.
Я продолжил установку преобразователя постоянного тока на место. Затем я подключил три шаговых двигателя к плате Arduino с ЧПУ, а также два концевых выключателя к концевым стопорным контактам X+ и Y+. Для питания станка я буду использовать блок питания 12В 6А постоянного тока. Плата Arduino CNC на самом деле может работать от 12 до 36 вольт, а также конкретный преобразователь постоянного тока, который я использую, может работать с теми же напряжениями. На вход преобразователя постоянного тока я добавил переключатель, чтобы я мог включать и выключать горячий провод отдельно. На выходе преобразователя постоянного тока я просто соединил два провода с двух концов провода сопротивления. Наконец, мы можем подключить Arduino и запитать его через USB-порт, а плату Arduino с ЧПУ и шаговые двигатели — через штепсельную вилку постоянного тока.
Итак, пришло время проверить машину, правильно ли она работает, и я начну с горячей проволоки. Вы можете видеть здесь, у меня есть 0 вольт на входе преобразователя постоянного тока, и как только я включаю переключатель, я получаю 12 вольт на входе. Затем на выходе преобразователя постоянного тока снова ноль вольт, но когда мы начинаем крутить потенциометр, мы можем регулировать выходное напряжение от 0 до 12 В, и поэтому ток течет по горячему проводу и преждевременно его температура.
Лучший способ проверить, какое напряжение следует установить на выходе преобразователя постоянного тока, — попытаться разрезать кусок пенопласта. Горячая проволока должна прорезать пенопласт без особого сопротивления и изгиба.
Тем не менее, после первоначального тестирования вы можете увидеть, что случилось с моим горячим проводом. Он растянулся из-за жары, и пружины, которые должны были это компенсировать, не сработали.
Собственно, пружины потеряли свою функциональность из-за перегрева, т.к. при такой конфигурации ток протекал и через них.
Итак, я заменил старые пружины на новые, и теперь я обошел пружины, подключив электрические провода напрямую к проводу сопротивления с помощью каких-то зажимов типа «крокодил».
Программное обеспечение для станков с ЧПУ Arduino
Итак, пришло время оживить этот станок и превратить его в настоящий станок с ЧПУ.
Для этого сначала нам нужно загрузить в Arduino прошивку, которая управляет движением машины. Наиболее популярным выбором для станков с ЧПУ DIY является прошивка GRBL.
Это открытый исходный код, и мы можем загрузить его с GitHub.com. Как только мы загрузим его в виде zip-файла, мы можем извлечь его, скопировать папку «grbl» и вставить в каталог библиотеки Arduino. Затем мы можем открыть среду разработки Arduino и в меню «Файл» > «Примеры» > grbl выбрать пример grblUpload. Теперь нам нужно выбрать плату Arduino, которую мы используем, Arduino UNO, и выбрать COM-порт, к которому подключена наша Arduino, и, наконец, загрузить этот скетч в Arduino. После загрузки теперь Arduino знает, как читать G-коды и как управлять машиной в соответствии с ними.
Далее нам нужен какой-то интерфейс или контроллер, который будет общаться и сообщать Arduino, что делать. Опять же, для этой цели я выбираю программу с открытым исходным кодом, и это Universal G-Code Sender.
Я загрузил версию платформы 2.0. Для запуска программы нам нужно распаковать zip-файл, перейти в папку «bin» и открыть любой из исполняемых файлов ugsplatfrom. На самом деле это программа JAVA, поэтому, чтобы иметь возможность запускать эту программу, сначала нам нужно установить JAVA Runtime Environment. Мы также можем скачать это бесплатно с официального сайта.
Итак, как только мы откроем программу Universal G-Code Sender, нам сначала нужно запустить мастер установки, чтобы настроить машину.
Здесь нам нужно просто выбрать правильный порт и подключить программу к Arduino. Как только соединение установлено, мы можем проверить направление движения моторов, нажимая кнопки. При необходимости мы можем изменить направление. Я выбрал положительные движения, чтобы перейти от исходного положения, где расположены концевые выключатели, к другим сторонам.
Далее нам нужно откалибровать шаги моторов, чтобы добиться правильных и точных движений. Поскольку мы выбрали разрешение 16 th шага для драйверов, а двигатели имеют 200 физических шагов, это означает, что потребуется 3200 шагов, чтобы двигатель совершил полное движение на 360 градусов. Теперь, в зависимости от типа трансмиссии или, в данном случае, размера шкивов, нам нужно рассчитать количество шагов, необходимых двигателю, чтобы машина переместилась на 1 мм. Значение по умолчанию здесь установлено на 250 шагов на мм. Итак, как только мы нажмем одну из этих кнопок перемещения, мотор сделает 250 шагов.
Теперь, на самом деле, с помощью линейки мы измеряем фактическое движение машины и вводим это число здесь, в программу. В соответствии с этим программа рассчитает и сообщит нам значение, которое мы должны изменить и обновить параметр шагов/мм. В моем случае это 83 шага/мм. Что касается оси Z, я установил ее на 400 шагов/мм, или это означает, что значение 1 мм для оси Z сделает поворот на 45 градусов.
Далее нам нужно проверить, правильно ли работают концевые выключатели. В зависимости от того, соединили ли мы их NO или NC, мы также можем инвертировать их здесь. Как я уже говорил, соединение NC работало лучше для меня. В любом случае, здесь мы должны заметить, что нам нужно отключить концевой выключатель оси Z, поскольку у нас его нет в нашей машине. Если мы не выключим его, мы не сможем вернуть машину домой. Для этого нам нужно перейти в папку grbl в библиотеке Arduino и отредактировать файл config.h.
Здесь нам нужно найти линии цикла возврата в исходное положение и закомментировать настройку по умолчанию для 3-осевого станка с ЧПУ и раскомментировать настройку для 2-осевого станка. Теперь нам нужно сохранить файл и повторно загрузить пример grblUpload в Arduino. Обратите внимание, что вам, вероятно, следует снова перезапустить программы, чтобы все заработало правильно.
Хорошо, теперь мы можем попытаться вернуть машину в исходное положение с помощью кнопки «Попробовать возврат». При нажатии машина должна начать двигаться к концевому выключателю X, а после нажатия она начнет двигаться по оси Y. При необходимости мы можем изменить направление концевых выключателей. В конце мастера настройки мы можем установить Soft Limits, которые фактически ограничивают максимальное расстояние, которое машина может пройти в каждом направлении. В моем случае это 45х45см.
Итак, теперь программа готова к работе. Перед каждым использованием вы всегда должны перезагрузить машину, а затем вы можете делать все, что хотите. Во-первых, я бы посоветовал поиграть и протестировать контроллер Jog или вручную переместить машину. Также на этом этапе следует попробовать вырезать несколько кусков пенопласта, чтобы выяснить, какая скорость подачи или скорость движения будут наиболее подходящими для вас.
Таким образом, вам следует поэкспериментировать с температурой горячей проволоки и скоростью подачи, чтобы выяснить, что обеспечит наиболее чистый и точный рез на пенопласте.
Генерация G-кода для станка с ЧПУ
Наконец, в этом видео осталось посмотреть, как подготовить чертежи, чтобы станок с ЧПУ мог создавать из них формы. Для этой цели нам понадобится программное обеспечение для векторной графики, и снова я выбрал программное обеспечение с открытым исходным кодом, и это Inkscape. Вы можете скачать его с официального сайта бесплатно.
Я покажу вам два примера, как подготовить G-код для станка с ЧПУ Arduino с помощью Inkscape. Итак, сначала мы должны установить размер страницы в соответствии с размером нашей рабочей области, а именно 45×45 см. Для первого примера я скачал изображение логотипа Arduino и импортировал его в программу. С помощью функции Trace Bitmap нам нужно преобразовать изображение в векторный формат.
Теперь, чтобы иметь возможность разрезать эту фигуру горячей проволокой, нам нужно сделать форму непрерывной траекторией.
Итак, когда у нас есть готовый чертеж, мы можем использовать расширение Gcodetools для создания G-кода. Во-первых, нам нужно создать точки ориентации.
Затем мы можем масштабировать нашу модель до желаемого размера. Далее нам нужно перейти в библиотеку инструментов и с ее помощью определить инструмент, который мы используем для станка с ЧПУ Arduino. Мы можем выбрать цилиндр, поскольку проволока, очевидно, имеет цилиндрическую форму. Здесь мы можем изменить такие параметры, как диаметр инструмента, я установил его на 1 мм, а также скорость подачи. Остальные параметры в данный момент не важны. Наконец, теперь мы можем сгенерировать G-код для этой формы, используя функцию Path to Gcode.
G-код — это просто набор инструкций, которые GRBL или Arduino могут понять и в соответствии с ними управлять шаговыми двигателями. Итак, теперь мы можем открыть G-код в программе отправки Универсального G-кода и через окно Визуализатора мы можем увидеть тот путь, который должна пройти машина.
Тем не менее, мы можем заметить здесь желтые линии, которые обозначают пустое путешествие или путешествие по воздуху в случае использования биты или лазера. Как я упоминал ранее, в этом случае горячая проволока не может двигаться по этим ходам, потому что проволока прорежет материал и испортит форму. Здесь мы действительно можем заметить, что у нас нет единого пути для всей формы, потому что мы забыли открыть замкнутые области внутри логотипа. Таким образом, мы можем просто вернуться к чертежу, сделать эти замкнутые области открытыми, а затем снова сгенерировать G-код.
Еще одна вещь, которую следует отметить, это хорошая идея, чтобы выбрать свою собственную начальную точку, дважды щелкнув фигуру, выберите узел и выберите «Разорвать путь в выбранном узле». Теперь, если мы откроем новый G-код, мы увидим, что путь начинается с более поздней буквы А, проходит через всю фигуру и заканчивается на букве А.
Для крепления деталей из пенопласта к станку с ЧПУ я сделал эти простые держатели с болтами M3, которые проникают в пенопласт и удерживают его на месте.
Итак, теперь я покажу вам еще один пример того, как сделать трехмерную фигуру. Мы сделаем квадратную форму столба, которую нужно разрезать с четырех сторон 90 градусов друг от друга.
Я получил форму столба с помощью метода Trace Bitmap, показанного ранее. Теперь мы можем нарисовать простой прямоугольник размером с столб и вычесть столб из прямоугольника. Мы удалим одну из сторон, так как нам нужна только одна траектория профиля столба. Итак, это фактический путь, который должен пройти станок с ЧПУ, и после каждого прохода нам нужно повернуть шаговый двигатель 3 rd на 90 градусов.
Чтобы сделать это при создании точек ориентации, нам нужно установить глубину Z на -8 мм. Затем в параметрах инструмента нам нужно установить шаг глубины на значение 2 мм. Теперь, после создания G-кода, мы можем открыть его в отправителе G-кода и увидеть, что машина сделает 4 прохода по одному и тому же пути с разницей в глубине 2 мм. В случае фрезерного станка с ЧПУ это будет означать, что каждый раз сверло будет углубляться на 2 мм для резки материала, но здесь, как показано ранее, мы устанавливаем ось Z так, чтобы она поворачивалась на 45 градусов с каждым миллиметром или на 90 градусов для перемещения шагового двигателя по оси Z на 2 мм.
Так или иначе, здесь нам также нужно немного изменить G-код. По умолчанию сгенерированный G-код после каждого прохода перемещает ось Z на значение 1 мм, что в случае фрезерного станка с ЧПУ означает, что он поднимает фрезу, когда требуется пустой ход.
На самом деле, мы могли бы оставить G-код без изменений, но он будет делать ненужные движения по оси Z или вращать пенопласт без всякой причины. Поэтому после каждой итерации кода нам просто нужно изменить значения оси Z, чтобы они оставались на том же месте, не возвращаясь к значению 1 мм.
Для установки детали из пенопласта для создания 3D-формы мы используем эту платформу, которая содержит несколько болтов M3, которые вставляются в деталь из пенопласта и удерживают ее во время формирования.
Перед запуском G-кода нам нужно вручную поднести горячую проволоку к куску пенопласта. Расстояние от центра до горячей проволоки должно быть столько, сколько мы хотим, чтобы наша фигура была галочкой. Или, если нам нужен точный размер, как на чертеже, нам нужно измерить расстояние от начала координат до центра фигуры на чертеже.
Затем нам нужно нажать кнопку Reset Zero в контроллере, чтобы сообщить программе, что она должна начинаться отсюда, а не из исходного положения. Вот и все, теперь нам просто нужно нажать кнопку «Воспроизвести», и станок с ЧПУ Arduino создаст 3D-форму.
Вы можете скачать файлы G-кода и файлы Inkscape для всех примеров здесь:
Это почти все для этого урока.